APERÇU DE LA TECHNOLOGIE
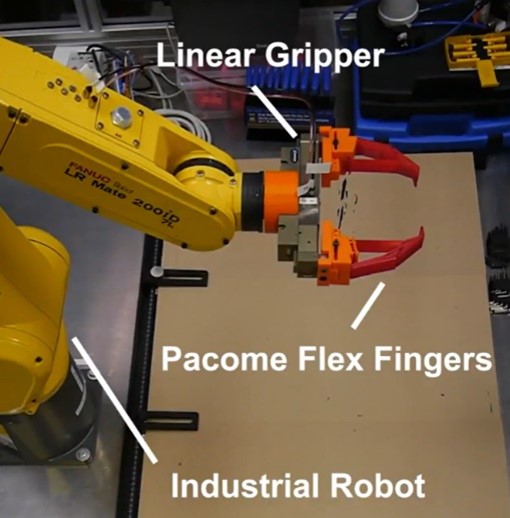
La technologie proposée ici permet d’intégrer directement sur n’importe quelle pince industrielle classique des doigts capables de s’auto-adapter à tout type d’objet. Comme ils ne sont fait que d’éléments passifs sans aucun moteur ni électronique, ces doigts sont beaucoup moins chers que les mains robotiques tout en atteignant le même objectif. Ces doigts permettent de saisir des objets de forme arbitraire de façon stable avec une prise enveloppante ou en pincée. De plus, aucune programmation supplémentaire du système automatisé qui manipule la pince n’est nécessaire puisque l’adaptation aux formes des objets ainsi que la sélection du type de prise est réalisée de façon passive par les doigts. L’invention est testée en conditions réalistes suivant plusieurs scénarios d’usage.
Avantages :
• Prise solide s’adaptant à toute forme d’objet
• Prises enveloppantes et de pincée précises
• Faible coût et fabrication simple (uniquement des éléments passifs)
• Transition facile pour les clients utilisant déjà le système de pinces et mâchoires
• Ne nécessite pas de programmation supplémentaire
• S’installe facilement sur tout type de pince standard, translationnelle ou rotative
AVANTAGES CONCURRENTIELS
- Versatilité
- Solution peu dispendieuse
- Implémentation facile
- Potentiel de miniaturisation
OPPORTUNITÉS D’AFFAIRES
- Technologie disponible pour une licence
- Recherche de partenaire de co-développement industriel
- Éligibilité au financement gouvernemental pour le programme de maturation industrielle/académique
APPLICATIONS
- Automatisation industrielle
- Robotique pour l’agro-alimentaire
- Robots chirurgicaux ou endoscopes
PROPRIÉTÉ INTELLECTUELLE