APERÇU DE LA TECHNOLOGIE
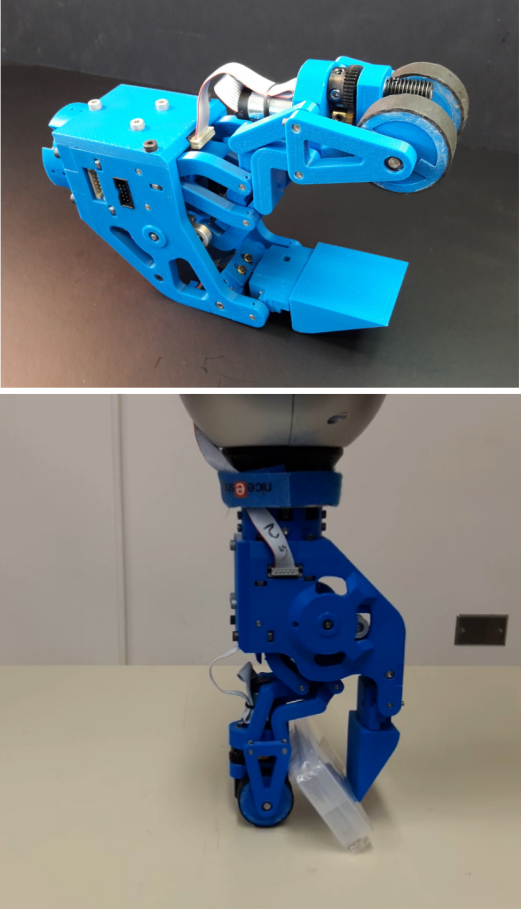
Le Laboratoire de robotique de l’Université Laval a mis au point une technologie de préhension d’avant-garde dotée de deux doigts entraînés par un mécanisme de Hoekens, qui optimise à la fois l’ouverture et l’efficacité de préhension. L’un des doigts est équipé d’une surface de roulement active avec un revêtement adaptable, tandis que l’autre peut être muni d’un ongle selon l’application.
- La technologie offre une prise en parallèle pour une préhension sécurisée des objets grâce au mécanisme de Hoekens, ce qui garantit que les deux doigts maintiennent leur prise.
- Il offre également une prise de ramassage qui permet une préhension efficace des objets plats en utilisant le rouleau ou les clous pour ramasser l’objet dans la pince.
- De plus, la surface active de la technologie lui permet de saisir des objets mous même sans accès à leurs bords, en créant un pli.
Ce préhenseur est facilement adapté à une large gamme de robots série (UR, Kuka, Yaskawa, Kinova, etc.) et nécessite un système électronique supplémentaire pour faire fonctionner le rouleau et le doigt, qui s’intègre parfaitement dans les environnements d’usine. Enfin, la pince a été conçue pour faciliter la fabrication et est optimisée pour une production efficace.
AVANTAGES CONCURRENTIELS
- Fonctions de prélèvement, de préhension et de prélèvement
- Reproductible même pour les articles plats (par exemple : livres, feuilles, etc.)
- Très efficace pour les articles mous (textiles, films, etc.)
- Compact pour utilisation dans un environnement encombré
- Peut être monté sur n’importe quel bras robotique
OPPORTUNITÉS D’AFFAIRES
- Technologies disponibles pour licence
- Partenariat de codéveloppement
- Éligible au financement gouvernemental de maturation industrie/universit
APPLICATIONS SUR LE MARCHÉ
- Robots industriels
- Robots d’entrepôt
PROTECTION DE LA PI
- Demande de brevet provisoire