TECHNOLOGY OVERVIEW
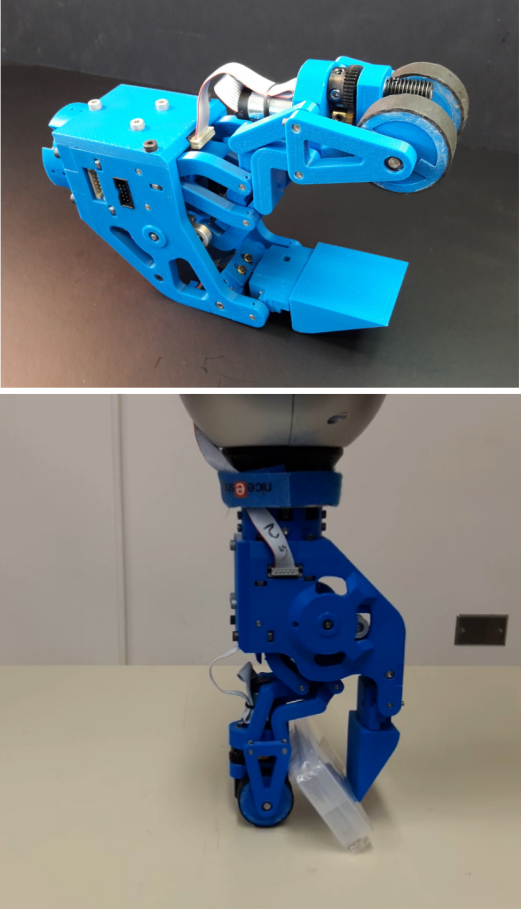
The Robotics Laboratory at Laval University has pioneered a groundbreaking gripper technology featuring two fingers driven by a Hoekens mechanism, which optimizes both the aperture and gripping efficacy. One of the fingers is equipped with an active rolling surface with a replaceable coating, while the other offers optional nails.
- The technology offers a parallel grip for secure grasping of objects through the Hoekens mechanism, which ensures both fingers maintain their grip.
- It also offers a picking grip, which enables efficient grasping of flat objects by using either the roller or nails to scoop the object back into the gripper.
- Moreover, the technology’s active surface enables it to grasp soft objects even without access to their edges, by creating a fold.
Additionally, this gripper can be easily adapted to a wide range of serial robots (UR, Kuka, Yaskawa, Kinova, etc.), and requires an additional electronic system to operate the roller and the finger, which seamlessly integrates into factory environments.
Lastly, the gripper has been designed for ease of manufacturing and is optimized for efficient production.
COMPETITIVE ADVANTAGES
- Picking, grasping and scooping functions
- Repeatable even for flat items (e.g. books, sheets, etc)
- Very efficient for soft items (textiles, films, etc.)
- Can be used in cluttered environment
- Can be mounted on any robotic arm
BUSINESS OPPORTUNITY
- Technology available for in-licensing
- Seeking for industrial partner
- Seeking investment and research partnership
- Eligible for governmental financing through program for industry/academia
MARKET APPLICATIONS
- Industrial robots
- Warehouse robots
IP PROTECTION
- Provisional patent application